论文阅读:Multi-camera Scene Reconstruction via Graph Cuts
Vladimir Kolmogorov and Ramin Zabih
(1)介绍
文章用graph cut(图割)即能量最小化的方法,解决了多相机场景下的三维重建问题。
能量最小化方法有三个特性:
- 它把输入图像对称
- 它处理的能见度得当
- 它保持空间平滑,同时保持连续性
文章指出,传统的方法(voxel occupancy,体素占有)存在不能保证两幅图片之间的一致性的问题,并介绍了两种算法来保证图片一致性,voxel color和space carving。
(2)问题抽象
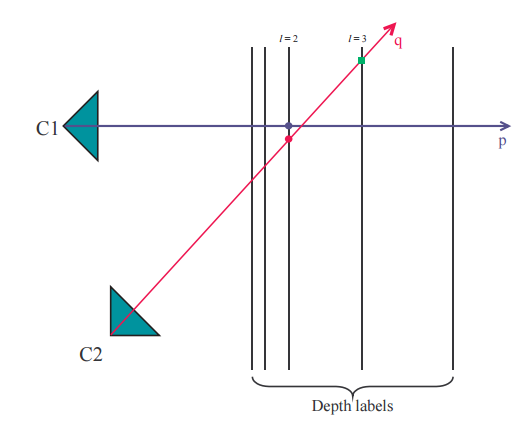
设多相机拍摄n幅图像, $ P = P_1\bigcup … \bigcup P_n $,体素$p\in P$;
令标签函数f将体素p映射到与深度相关的标签$l$;
这样3D空间中的一个点就可以用一个\
这样的点只有当他们处于同一个label,即$l$相等时他们才有相互联系;
定义需要最小化的能量函数:
$E(f) = E{data}(f) + E{smoothness}(f) + E_{visibility}(f)$
其中$D(p, q)$是体素$p$和体素$q$之间不可见的地方。
$$$$


(3)图割
图割(Graph cuts)是一种十分有用和流行的能量优化算法。
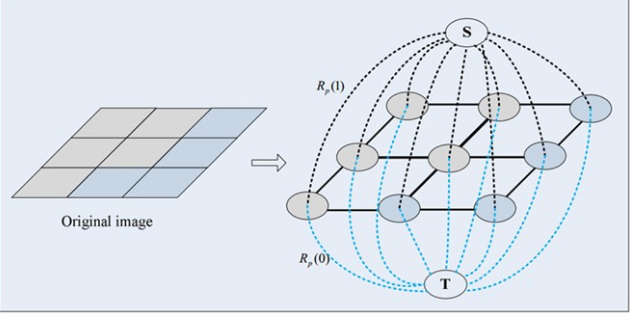
此方法把图像分割问题与图额最小割(min cut)问题相关联。首先用一个无向图$G =
- 第一种普通顶点对应于图像中的每个像素。每两个邻域顶点(对应于图像中没两个邻域像素)的连接就是一条边。这种边也叫n-links。
- 除图像像素外,还有另外两个终端顶点,叫源点S(source)和汇点T(sink)。每个普通顶点和这两个终端顶点之间都有连接,组成第二种边,称为t-links。
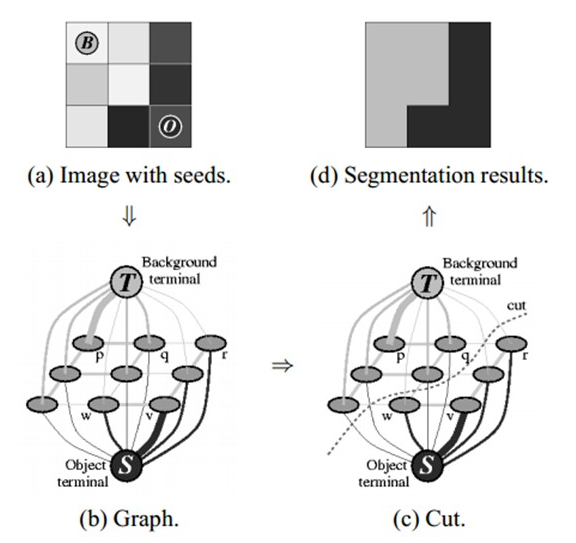
图中每条边都有一个非负的权值we,也可以理解为cost(代价或者费用)。一个cut(割)就是图中边集合E的一个子集C,那这个割的cost(表示为|C|)就是边子集C的所有边的权值的总和。
Graph Cuts中的Cuts是指这样一个边的集合,很显然这些边集合包括了上面2种边,该集合中所有边的断开会导致残留”S”和”T”图的分开,所以就称为“割”。如果一个割,它的边的所有权值之和最小,那么这个就称为最小割,也就是图割的结果。
Graph cut的3x3图像分割示意图:我们取两个种子点(就是人为的指定分别属于目标和背景的两个像素点),然后我们建立一个图,图中边的粗细表示对应权值的大小,然后找到权值和最小的边的组合,也就是(c)中的cut,即完成了图像分割的功能。